Ultrasonic Sensor ដែលយើងអាចស្គាល់បានថាជាឧបករណ៍សម្រាប់វាស់រយៈចំងាយខ្លីដោយប្រើរលកសម្លេងបាញ់ចេញ និងគណនាចំងាយនៃអនុគមន៍(ទាក់ទងគ្នា)នឹងរយៈពេលដែលសម្លេងផ្លាតមកវិញ។

ជាធម្មតាឧបករណ៍ប្រភេទនេះមានពីរផ្នែកគឺ ផ្នែកបាញ់រលកសម្លេងចេញ និងផ្នែកទទួលរលកសម្លេងដែលផ្លាតពីរត្ថុនៅពីមុខវាមកវិញ ហើយករយៈពេលចន្លោះពេលដែលបាញ់ចេញនិងត្រលប់មកវិញមកគណនា ដោយប្រើរូបមកផ្សេងៗគ្នាទៅតាមប្រភេទម៉ូដែលរបស់ឧបករណ៍។
- ចរន្តពេលដំណើរការ៖ 15mA
- មុំផ្លាត៖ 15°
- ចំងាយវាស់៖ 2cm – 400 cm/1″ – 13ft
- ប្រវែងផាល់៖ 10uS
- ហ្វ្រេកង់សម្លេង៖ 40kHz

- VCC ៖ សម្រាប់ភ្លើងដែលដំណើរឧបករណ៍ 5V
- Trig ៖ សម្រាប់បញ្ជារអោយបាញ់សម្លេងចេញ
- Echo ៖ ជាអ្នកចាំទទួលសម្លេងដែលផ្លាតមកវិញ
- GNA ៖ ភ្ជាប់ទៅប៉ូលអវិជ្ជមាន (-)

យោងតាមរូបខាងលើ បើយើងធ្វើការរកបញ្ច្រាស់មកវិញដោយដាក់ឧបសគ្គមួយនៅពីមុខឧបករណ៍ចំងាយ 10សង់ទីម៉ែត្រ ហើយរករយៈពេលដែលរលក់សម្លេងផ្លាតត្រលប់មកឧបករណ៍ នោះយើងនឹងទទួលបានចំងាយស្មើនឹង 0.0032/2 គុណនឹងរយៈពេលដែលផ្លាតមកវិញ។ មូលហេតុដែលត្រូវចែកនឹង 2 ដោយសារតែចំងាយដែលរលក់សម្លេងត្រូវធ្វើដំណើរគឺ ទៅហើយត្រលប់មកវិញទៀត ដែលស្មើនឹង 2 ដងនៃចំងាយពិតប្រាកដ។

ជាធម្មតាឧបករណ៍ប្រភេទនេះមានពីរផ្នែកគឺ ផ្នែកបាញ់រលកសម្លេងចេញ និងផ្នែកទទួលរលកសម្លេងដែលផ្លាតពីរត្ថុនៅពីមុខវាមកវិញ ហើយករយៈពេលចន្លោះពេលដែលបាញ់ចេញនិងត្រលប់មកវិញមកគណនា ដោយប្រើរូបមកផ្សេងៗគ្នាទៅតាមប្រភេទម៉ូដែលរបស់ឧបករណ៍។
ឧទាហរណ៍៖ HC-SR04
ដើម្បីងាយស្រួលយល់ យើងអាចលើកយកប្រភេទឧបករណ៍ដែលពេញនិយមក្នុងការប្រើប្រាស់មកពិភាក្សា។លក្ខណៈរបស់ HC-SR04
- ភ្លើងសម្រាប់ដំណើរការ៖ 5V- ចរន្តពេលដំណើរការ៖ 15mA
- មុំផ្លាត៖ 15°
- ចំងាយវាស់៖ 2cm – 400 cm/1″ – 13ft
- ប្រវែងផាល់៖ 10uS
- ហ្វ្រេកង់សម្លេង៖ 40kHz
ដំណើរការរបស់ HC-SR04
ប្រភេទឧបករណ៍មានជើងបួនសម្រាប់ប្រើប្រាស់ និងភ្លើងសម្រាប់ដំណើរការឧបករណ៍។ ជើងទាំងបួនមានដូចខាងក្រោម៖
- VCC ៖ សម្រាប់ភ្លើងដែលដំណើរឧបករណ៍ 5V
- Trig ៖ សម្រាប់បញ្ជារអោយបាញ់សម្លេងចេញ
- Echo ៖ ជាអ្នកចាំទទួលសម្លេងដែលផ្លាតមកវិញ
- GNA ៖ ភ្ជាប់ទៅប៉ូលអវិជ្ជមាន (-)
ការគណនា
ដោយសារតែឧបករណ៍ប្រើរលកសម្លេង ដូច្នេះការគណនាក៏ត្រូវការល្បឿរបស់សម្លេងជាចាំបាច់។ ដោយយើងអាចដឹងបានថាល្បឿននៃសម្លេងគឺ 340ម៉ែត្រក្នុងមួយវិនាទី(អានបន្ថែម)។
យោងតាមរូបខាងលើ បើយើងធ្វើការរកបញ្ច្រាស់មកវិញដោយដាក់ឧបសគ្គមួយនៅពីមុខឧបករណ៍ចំងាយ 10សង់ទីម៉ែត្រ ហើយរករយៈពេលដែលរលក់សម្លេងផ្លាតត្រលប់មកឧបករណ៍ នោះយើងនឹងទទួលបានចំងាយស្មើនឹង 0.0032/2 គុណនឹងរយៈពេលដែលផ្លាតមកវិញ។ មូលហេតុដែលត្រូវចែកនឹង 2 ដោយសារតែចំងាយដែលរលក់សម្លេងត្រូវធ្វើដំណើរគឺ ទៅហើយត្រលប់មកវិញទៀត ដែលស្មើនឹង 2 ដងនៃចំងាយពិតប្រាកដ។
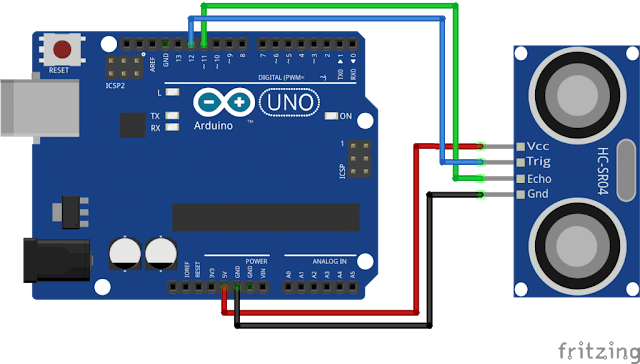
តេស្តជាមួយ Arduino
- // defines pins numbers
- const int trigPin = 12;
- const int echoPin = 11;
- // defines variables
- long duration;
- int distance;
- void setup() {
- pinMode(trigPin, OUTPUT); // Sets the trigPin as an Output
- pinMode(echoPin, INPUT); // Sets the echoPin as an Input
- Serial.begin(9600); // Starts the serial communication
- }
- void loop() {
- // Clears the trigPin
- digitalWrite(trigPin, LOW);
- delayMicroseconds(2);
- // Sets the trigPin on HIGH state for 10 micro seconds
- digitalWrite(trigPin, HIGH);
- delayMicroseconds(10);
- digitalWrite(trigPin, LOW);
- // Reads the echoPin, returns the sound wave travel time in microseconds
- duration = pulseIn(echoPin, HIGH);
- // Calculating the distance
- distance= duration*0.034/2;
- // Prints the distance on the Serial Monitor
- Serial.print("Distance: ");
- Serial.println(distance);
- }








